Denoising Diffusion Probabilistic Models
Ho, Jonathan, Ajay Jain, and Pieter Abbeel. “Denoising Diffusion Probabilistic Models.” arXiv:2006.11239. Preprint, arXiv, December 16, 2020. https://doi.org/10.48550/arXiv.2006.11239.
Table of Contents
Abstract
- High quality image synthesis results using diffusion probabilistic models.
- Latent‑variable model – The model assumes there’s an unobserved variable z that, after some transformation, produces your image x.
- Trained on Weighted variational bound designed according to a novel connection between diffusion probabilistic models and denoising score matching with Langevin dynamics.
Diffusion Models
We use Diffusion probabilist model (aka Diffusion Models). They are a class of generative models that learn to create high-quality samples by reversing a gradual corruption process.
More Details on Diffusion models → diffusion-models.html
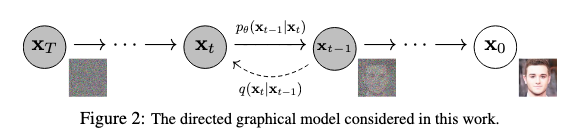
The Forward Process (Data → Noise)
Markov chain that gradually adds Gaussian noise to the data according to a variance schedule: \(β_1, . . . , β_T\). It gradually corrupts the original data by adding Gaussian noise:
\[q(x_{1:T}|x_0) = ∏^T_{t=1} q(x_t|x_{t-1})\] \[q(x_t|x_{t-1}) = N(x_t; \sqrt{(1-β_t)}x_{t-1}, β_tI)\]Key aspects:
- \(x_0\): Original clean data
- \(x_1, x_2, ..., x_t\): Progressively noisier versions
- \(β_t\): Variance schedule controlling how much noise is added at each step
- This process is fixed and doesn’t require learning
The Reverse Process (Noise → Data)
The reverse process learns to undo the forward corruption:
\[p_θ(x_{0:T}) = p(x_T) ∏_{t=1}^T p_θ(x_{t-1}|x_t)\] \[p_\theta(x_{t-1} \mid x_t) \;=\; \mathcal{N}\!\Bigl( x_{t-1} \;;\; \mu_\theta(x_t, t), \;\Sigma_\theta(x_t, t)\Bigr)\]Key aspects:
- Starts from pure noise: \(p(x_T) = N(x_T; 0, I)\)
- Each step is a learned Gaussian transition
- \(μ_θ\) and \(Σ_θ\) are neural network predictions
Training Objective
The model is trained by optimising the variational bound:
\[\mathcal{L} \;=\; \mathbb{E}_q \left[ -\log \frac{p_\theta(x_{0:T})}{q(x_{1:T} \mid x_0)}\right]\]Efficient sampling property: The forward process allows sampling at any timestep t directly:
\[q(x_t \mid x_0) \;=\;\mathcal{N}\!\Bigl( x_t \;;\; \sqrt{\bar{\alpha}_t} \, x_0,\; (1 - \bar{\alpha}_t) I\Bigr)\]where \(\bar{\alpha}_t = \prod_{s=1}^{t} \alpha_s\) and \(\alpha_t = 1 - \beta_t\)
Variational Lower Bound Loss
We want to model realistic image data. Our goal is to maximize the likelihood of real images under a generative model:
\[\max\; p_\theta(x_0) = \max \int p_\theta(x_{0:T})\; dx_{1:T}\]But this marginalization over all possible noise trajectories is intractable. So, we approximate it using variational inference.
Starting from the log-likelihood:
\[\log p_\theta(x_0) = \log \int p_\theta(x_{0:T})\; dx_{1:T}\]We reformulate the intractable log-likelihood using a known forward process (diffusion) \(q(x_{1:T} \mid x_0)\):
\[\log p_\theta(x_0) = \log \int \frac{p_\theta(x_{0:T})\; q(x_{1:T} \mid x_0)}{q(x_{1:T} \mid x_0)} dx_{1:T}\] \[= \log \mathbb{E}_q\left[\frac{p_\theta(x_{0:T})}{q(x_{1:T} \mid x_0)}\right]\] \[\geq \mathbb{E}_q\left[\log \frac{p_\theta(x_{0:T})}{q(x_{1:T} \mid x_0)}\right] \quad \text{[Jensen's inequality]}\]This gives us the variational lower bound which we minimize during training:
\[\mathcal{L} = \mathbb{E}_q\left[-\log \frac{p_\theta(x_{0:T})}{q(x_{1:T} \mid x_0)}\right] = \mathbb{E}_q\left[-\log p_\theta(x_{0:T}) + \log q(x_{1:T} \mid x_0)\right]\]In context of image generation: We’re finding the best denoising path to generate realistic images from noise.
🧮 Derivation of Above Loss
How we got to the above loss:
- Original Integral:
$$I = \int f(x)\, dx \quad \text{where } f(x) = p_\theta(x_{0:T})$$ - Multiply and Divide by \( g(x) \):
$$I = \int f(x) \cdot \frac{g(x)}{g(x)}\, dx \quad \text{where } g(x) = q(x_{1:T} \mid x_0)$$ - Rearranged Form:
$$I = \int \frac{f(x)}{g(x)} \cdot g(x)\, dx$$ - Recognize as Expectation:
$$I = \mathbb{E}_g\left[\frac{f(x)}{g(x)}\right]$$ - Apply Jensen's Inequality:
For a convex function \( f \) and a random variable \( X \):
$$f(\mathbb{E}[X]) \leq \mathbb{E}[f(X)]$$
For a concave function like \( \log \), the inequality flips:
$$\log \mathbb{E}[X] \geq \mathbb{E}[\log X]$$
Therefore:
$$\log \mathbb{E}_q\left[\frac{p_\theta(x_{0:T})}{q(x_{1:T} \mid x_0)}\right] \geq \mathbb{E}_q\left[\log \frac{p_\theta(x_{0:T})}{q(x_{1:T} \mid x_0)}\right] \quad \text{[Jensen's inequality]}$$
Expanding the Variational Bound
Reverse Process (learned):
\[p_\theta(x_{0:T}) = p(x_T) \prod_{t=1}^{T} p_\theta(x_{t-1} \mid x_t)\]This defines how we turn noise into an image.
Forward Process (known):
\[q(x_{1:T} \mid x_0) = \prod_{t=1}^{T} q(x_t \mid x_{t-1})\]This adds noise step by step to a clean image.
The Full Loss Function after using p and q from above:
Breaking the bound into individual terms:
\[\mathcal{L} = \mathbb{E}_q\left[-\log p(x_T) - \sum_{t=1}^{T} \log p_\theta(x_{t-1} \mid x_t) + \sum_{t=1}^{T} \log q(x_t \mid x_{t-1})\right]\] \[= \mathbb{E}_q\left[-\log p(x_T) + \log q(x_T \mid x_{T-1}) - \sum_{t=1}^{T-1} \log \frac{p_\theta(x_{t-1} \mid x_t)}{q(x_t \mid x_{t-1})} - \log p_\theta(x_0 \mid x_1)\right]\]This measures how well our reverse process undoes the forward noise corruption.
Rewriting the Loss
By Bayes’ Rule:
\[q(x_t \mid x_{t-1}) \cdot q(x_{t-1} \mid x_0) = q(x_t \mid x_0) \cdot q(x_{t-1} \mid x_t, x_0)\]This allows us to rewrite the loss as:
\[\mathcal{L} = \mathbb{E}_q\left[\mathrm{D_{KL}}(q(x_T \mid x_0) \parallel p(x_T))\right] + \sum_{t=2}^{T} \mathbb{E}_q\left[\mathrm{D_{KL}}(q(x_{t-1} \mid x_t, x_0) \parallel p_\theta(x_{t-1} \mid x_t))\right] + \mathbb{E}_q\left[-\log p_\theta(x_0 \mid x_1)\right]\]How?
1. Rewriting each log term as a KL divergence
We use the identity:
$$\mathrm{D_{KL}}(q(z) \| p(z)) = \mathbb{E}_{q(z)}[\log q(z) - \log p(z)]$$
This allows us to convert pairs of log terms into KL divergences, wherever we can express a tractable pair of distributions.
2. Final timestep prior matching
We isolate the final timestep:
$$-\log p(x_T) + \log q(x_T \mid x_{T-1}) \approx \mathrm{D_{KL}}(q(x_T \mid x_0) \parallel p(x_T))$$
Because:
$$q(x_T \mid x_0) = \int q(x_T \mid x_{T-1}) q(x_{T-1} \mid x_0) \, dx_{T-1}$$
And it's tractable, so we merge these into one KL term.
3. KL terms for t = 2 to T
For steps t = 2 to T, using Bayes' rule:
$$q(x_t \mid x_{t-1}) \cdot q(x_{t-1} \mid x_0) = q(x_t \mid x_0) \cdot q(x_{t-1} \mid x_t, x_0)$$
Taking logs and summing:
$$\log q(x_t \mid x_{t-1}) - \log p_\theta(x_{t-1} \mid x_t) = \log q(x_{t-1} \mid x_t, x_0) - \log p_\theta(x_{t-1} \mid x_t)$$
Thus, each of those becomes a KL divergence:
$$\mathrm{D_{KL}}(q(x_{t-1} \mid x_t, x_0) \| p_\theta(x_{t-1} \mid x_t))$$
4. Final step t = 1
There's no posterior \( q(x_0 \mid x_1, x_0) \), so we leave the log term as-is:
$$-\log p_\theta(x_0 \mid x_1)$$
Interpretation for image generation: We encourage our model to align with the known noise process and accurately reconstruct the original image.
Named Components:
\[\mathcal{L} = \mathcal{L}_T + \sum_{t=2}^{T} \mathcal{L}_{t-1} + \mathcal{L}_0\]Each term in the loss plays a specific role:
where
Prior Matching: \(L_T\)
KL between final noisy state and prior
\[\mathcal{L}_T = \mathrm{D_{KL}}(q(x_T \mid x_0) \parallel p(x_T))\]- Pushes noisy images to align with Gaussian noise
- Ensures the final forward process state:
\(q(x_T \mid x_0)\) matches the prior: \(p(x_T) = \mathcal{N}(0, I)\) - When \(\beta_t\) are fixed (not learned), this becomes a constant and can be ignored during training
- No parameters to optimize here!
Denoising KL Terms: \(L_{t-1}\)
KL between forward and reverse process at each step
\[\mathcal{L}_{t-1} = \mathbb{E}_q\left[\mathrm{D_{KL}}(q(x_{t-1} \mid x_t, x_0) \parallel p_\theta(x_{t-1} \mid x_t))\right]\]- Forward posterior is tractable. We can compute it exactly:
- With:
- Ensures reverse denoising steps are accurate.
What it does:
- Ground truth target:
\(q(x_{t-1} \mid x_t, x_0)\) — the “true” way to denoise \(x_t\) when we know \(x_0\) - Model prediction:
\(p_\theta(x_{t-1} \mid x_t)\) — what our model thinks is the right way to denoise - Training signal:
Make the model’s denoising match the ground truth denoising
Reconstruction loss for final denoising step - \(L_0\)
\[\mathcal{L}_0 = \mathbb{E}_q\left[-\log p_\theta(x_0 \mid x_1)\right]\]- Handles the final step from slightly noisy image to clean discrete pixels
- Uses a discrete decoder to ensure proper pixel values {0,1,…,255}
Parameterisation Trick: Predicting Noise instead of Image
Traditional approach: Directly predict \(μ_θ(x_t, t)\)
Loss:
\[\mathcal{L}_{t-1} = \mathbb{E}_q\left[\frac{1}{2\sigma_t^2} \| \tilde{\mu}_t(x_t, x_0) - \mu_\theta(x_t, t) \|^2\right] + C\]Noise Prediction
Instead of predicting clean images directly, we reparameterize:
\[x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1 - \bar{\alpha}_t} \varepsilon\]Then train the model to predict \(\varepsilon\), the noise and Loss becomes:
\[\mathcal{L}_{t-1} = \mathbb{E}_{x_0, \varepsilon}\left[\frac{\beta_t^2}{2\sigma_t^2 \alpha_t (1 - \bar{\alpha}_t)} \| \varepsilon - \varepsilon_\theta(x_t, t) \|^2\right]\]What this means:
- Instead of predicting the denoised image directly, predict the noise
- The model learns: “Given a noisy image, what noise was added?”
- Much more stable and effective training signal!
The Simplified Objective
The full variational bound has complex weighting terms: \(\frac{\beta_t^2}{2\sigma_t^2 \alpha_t (1 - \bar{\alpha}_t)}\)
The paper proposes ignoring these weights:
\[\mathcal{L}_{\text{simple}}(\theta) = \mathbb{E}_{t, x_0, \varepsilon}\left[ \| \varepsilon - \varepsilon_\theta(x_t, t) \|^2 \right]\]Where:
\[x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1 - \bar{\alpha}_t} \varepsilon\] \[t \sim \text{Uniform}(1, T)\]This balances all noise levels equally and avoids overfitting to low-noise timesteps.
Problem with original weighting:
- Small t (little noise): Large weight, easy task
- Large t (lots of noise): Small weight, hard task
- Model focuses on easy denoising tasks!
Solution with uniform weighting:
- Equal attention to all noise levels
- Model learns difficult denoising better
- Better sample quality in practice
Training Algorithm
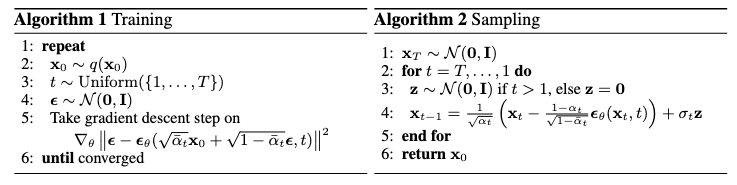
Training
- Sample real data: Get a training image from your dataset
- Random timestep: Choose how much noise to add (uniform across all levels)
- Sample noise: Generate the specific noise to add
- Create noisy version: Apply the forward process in one step
- Predict noise: Ask the model “what noise was added?”
- Update: Make the model better at noise prediction
- Single-step training: Instead of running the full T-step forward process, we can jump directly to any timestep t using the closed-form formula.
- Stochastic training: Each batch sees different noise levels, so the model learns to denoise across all levels simultaneously.
- Simple objective: Just predict noise - no complex distributions or adversarial training.
Connection to Score Matching
The noise prediction objective is equivalent to denoising score matching:
\[\nabla_{x_t} \log p(x_t) \approx -\frac{\varepsilon}{\sqrt{1 - \bar{\alpha}_t}}\]What this means:
- Predicting noise \(\varepsilon\) is equivalent to predicting the gradient of the log-probability
- The model learns the “gradient field” pointing toward high-probability regions
- Sampling follows these gradients to find realistic images
Why this Matter?
- Theoretical foundation: Connects diffusion models to the rich theory of score-based generative models.
- Sampling interpretation: The reverse process becomes Langevin dynamics following learned gradients.
- Stability: Score matching is known to be more stable than adversarial training.
More
Variance Schedule Choice
The paper fixes the forward process variances \(β_t\) to constants rather than learning them.
- This simplification means the forward process q has no learnable parameters
- The term \(L_T\) becomes constant and can be ignored during training
- Linear schedule: \(β_t\) increases linearly from \(β_1\) to \(β_T\)
- Typical values: \(β_1 = 0.0001\), \(β_T = 0.02\)
- T steps: Usually T = 1000 for training
Covariance Choice:
The model sets \(\Sigma_\theta(x_t,t) = \sigma_t^2 I\) (diagonal, time-dependent constants):
- \(\sigma_t^2 = \beta_t\): Optimal when \(x_0 \sim N(0,I)\)
- \(\sigma_t^2 = \tilde{\beta}_t\): Optimal when \(x_0\) is deterministic
- Both choices gave similar empirical results
Image Preprocessing:
- Images are scaled from {0,1,…,255} to [-1,1]
- Ensures consistent neural network input scaling
- Starting point is standard normal prior \(p(x_T)\)
Practical Implementation Details
- Training Tips:
- EMA for sampling
- Gradient clipping
- Cosine learning rate schedule
- Data augmentation
Experiments
Experiment Setup
- T = 1000: Number of diffusion steps, matching prior work to keep neural network evaluations comparable.
- Noise schedule: Linearly increasing variances from \(β_1 = 10^{-4}\) to \(β_T = 0.02\), which keeps added noise small but enough to reach near-complete destruction of the original signal by the end.
- Signal-to-noise control: Final KL divergence from Gaussian is \(\approx 10^{-5}\) bits/dim — ensures the model learns well.
Model Architecture
- U-Net: Based on unmasked PixelCNN++ with group normalization and shared weights across time.
- Time embeddings: Injected using Transformer sinusoidal embeddings.
- Self-attention: Added at 16×16 feature resolution.
Training Objective Ablation
- True Variational Bound: Best for compression (lossless codelength).
- Simplified Objective: Best for sample quality.
- Predicting mean \(\tilde{\mu}\):
- Works well with variational bound.
- Performs worse with simple MSE objective.
- Learned variance: Leads to instability and poor quality.
- Fixed variance: More stable.
Progressive Generation
- Generate images progressively from random bits (reverse process).
- Large-scale features appear early; details come later.
- Shows that Gaussian diffusion allows coarse-to-fine image generation.
Interpolation in Latent Space
- Interpolate two images in latent space (at same timestep
t), then decode via reverse process. - Results:
- Smooth and meaningful transitions in pose, hair, background, etc.
- Eyewear remains unchanged, showing model’s bias or lack of variation in that feature.
- Larger
t→ blurrier but more varied (i.e., creative) results.
Connection to Autoregressive Models
- Rewriting the variational bound shows diffusion is like autoregressive decoding with a continuous and generalized bit ordering.
- Gaussian noise acts like masking but may be more natural and effective.
- Unlike true autoregressive models, diffusion can use T < data dimension, allowing flexibility in sampling speed or model power.
Key Takeaways
- Diffusion models:
- Achieve high-quality image synthesis even without conditioning.
- Show strong lossy compression ability (good perceptual reconstructions).
- Can act as a generalization of autoregressive models.
- Model architecture and training objective greatly affect performance.
- Progressive generation, interpolation, and decoding are all efficient and visually plausible.